 Makes Autoregressive Models Practical for Real-World Robotics")
How Ordered Action Tokenization (OAT) Makes Autoregressive Models Practical for Real-World Robotics
Autoregressive models changed the world of language. They predict the next token in a sequence with remarkable accuracy, scale beautifully with data, and power tools we use every day. For years, robotics researchers have asked a natural question:
Table Of Content
- Can we use the same idea to control robots?
- The Core Problem: Continuous Motion vs Discrete Tokens
- What is Ordered Action Tokenization?
- Why Token Ordering Matters
- Making Autoregressive Control Low-Latency
- Guaranteed Decodability = Safer Robots
- Why This Connects to Language-Model Scaling
- Real-World Implications
- A Shift in How We Think About Robot Actions
- Closing Insights
Can we use the same idea to control robots?
In theory, yes. In practice, it’s been difficult.
Robots don’t speak in words. They move through continuous actions—joint angles, velocities, torques, and trajectories that flow in real time. Turning these smooth motions into something an autoregressive model can predict (like tokens in a sentence) is not straightforward.
This is where Ordered Action Tokenization (OAT) becomes important. It offers a new way to represent robot actions as compact, structured, and always-decodable token sequences, making autoregressive control not just possible, but practical.
Let’s break down why this matters and how OAT bridges the gap between language-style AI scaling and real-world robotic control.
The Core Problem: Continuous Motion vs Discrete Tokens
Autoregressive models work best with discrete tokens arranged in a meaningful order:
word → word → word → sentence
But robot control looks more like:
joint angles → velocities → positions → force → time
These are continuous values, not symbols. If you naïvely convert them into tokens, you face several issues:
Too many tokens per action step (slow inference)
Poor structure (model struggles to learn dependencies)
Invalid sequences that cannot be decoded back into safe robot motions
High latency, which is unacceptable for real-time control
Earlier approaches tried simple quantization or codebooks, but they either exploded the token count or produced unstable outputs.
OAT solves this by rethinking how actions are tokenized and in what order they are generated.
What is Ordered Action Tokenization?
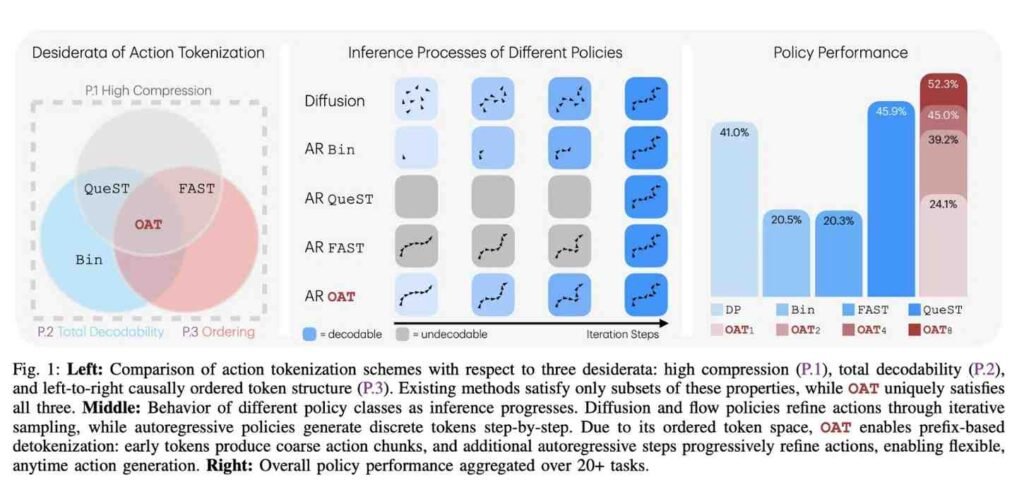
Ordered Action Tokenization is a method that converts a robot’s continuous action at each timestep into a short, causally ordered sequence of tokens with three key properties:
Compact – Very few tokens represent an entire action
Ordered – Tokens are generated in a meaningful causal order
Always Decodable – Any valid token sequence maps back to a safe action
This is crucial.
In language, if a model predicts a slightly wrong word, the sentence still makes sense.
In robotics, a slightly wrong token can cause invalid or unsafe motion.
OAT ensures that every possible token combination corresponds to a valid robot action.
Why Token Ordering Matters
The “ordered” part of OAT is not cosmetic—it’s fundamental.
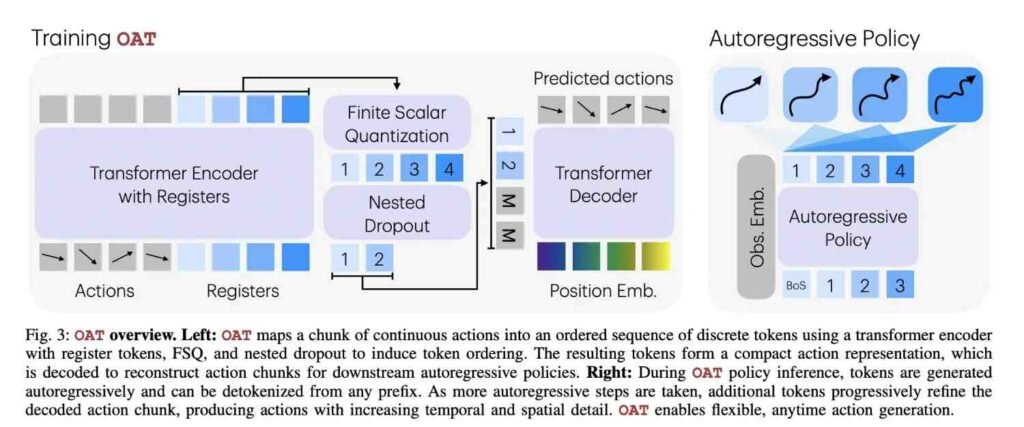
Instead of predicting all parts of an action at once, the model predicts them sequentially in a logical dependency chain. For example:
First token decides the coarse motion region
Next token refines the motion direction
Next token adds precision
Final token completes the action specification
Each token conditions the next one.
This mirrors how autoregressive models already work in language and allows the model to learn structure naturally.
The result?
Better learning efficiency
Fewer tokens
Faster inference
More predictable outputs
Making Autoregressive Control Low-Latency
One major concern with autoregressive models in robotics is speed.
Robots can’t wait for 50 tokens to be generated before they move. Decisions must happen in milliseconds.
Because OAT uses very short token chains, it allows a powerful trade-off:
The robot can choose to generate fewer tokens for faster decisions, or more tokens for higher precision.
This means the same model can operate in:
Fast mode for reactive control
Precise mode for delicate manipulation
This kind of dynamic control was not possible with earlier tokenization schemes.
Guaranteed Decodability = Safer Robots
Another breakthrough with OAT is that token sequences are structurally valid by design.
No matter what the model predicts, the tokens can always be converted back into a real, executable robot action.
This removes a huge class of failure cases where:
Tokens don’t correspond to real joint configurations
Actions become physically impossible
The controller crashes or behaves unpredictably
In robotics, this reliability is more important than raw model accuracy.
Why This Connects to Language-Model Scaling
Here’s the bigger picture.
Language models scale because they operate on:
Tokens
Sequences
Autoregressive prediction
OAT allows robot control to be framed in the same paradigm.
Now we can:
Train on large robot datasets like text corpora
Use transformer architectures effectively
Benefit from scaling laws similar to LLMs
Unify perception, reasoning, and action in one model
This is a step toward generalist robot models trained the way we train language models.
Real-World Implications
With OAT-style tokenization, robots can:
Learn from massive datasets of demonstrations
Execute real-time control with low latency
Adapt precision based on task requirements
Avoid invalid or unsafe motions
Use standard autoregressive training pipelines
This makes it far easier to apply modern AI infrastructure to robotics without inventing entirely new architectures.
A Shift in How We Think About Robot Actions
Traditionally, robot control focused on:
Continuous control signals → classical controllers → optimization
OAT reframes the problem as:
Structured token prediction → autoregressive model → decoded action
This is a conceptual shift, not just a technical trick.
It treats robot motion as a language of actions that can be learned, predicted, and scaled.
Closing Insights
Ordered Action Tokenization doesn’t just improve token efficiency. It unlocks the ability to apply language-model style learning to robotics in a safe, fast, and structured way.
By ensuring compact tokens, meaningful ordering, and guaranteed decodability, OAT makes autoregressive control viable for real-world robots.
As robotics moves toward foundation models and large-scale training, approaches like OAT may become the bridge that finally connects how we train AI for language with how we control machines in the physical world.